The Future of Autonomous Vehicles
Speculative Research Project on AV Trust and Safety w/ Johns Hopkins APL
SPONSOR
ROLE
TIMELINE
JHU APL
UX Researcher • Team of 9
January - May 2025 (16 weeks)
Problem
Autonomous vehicles may be technically capable, but public trust remains fragile, especially in dense, unpredictable environments like college campuses. How might we support perceptions of safety and decision-making of campus road users in an autonomous future?
Constraint
We were not designing policies or infrastructure alone. We needed to design a believable user-facing experience that helps people understand and trust AV behavior in real time.
Outcome
We designed a campus-based autonomous shuttle experience, supported by an in-vehicle interface and a design fiction vignette, to explore how transparency and communication shape trust during uncertainty.
PROJECT OVERVIEW
The Johns Hopkins Applied Physics Lab is a not-for-profit UARC (University Affiliated Research Center) focused on solving complex challenges and developing novel solutions for public service and innovation. As autonomous vehicles become increasingly prevalent, ensuring the safety and trust of all road users will be crucial. This project focuses on understanding how pedestrians, cyclists, and other vulnerable road users might interact with autonomous systems in the year 2040, especially on college campuses, while also examining the coexistence of autonomous and human-driven vehicles. A key objective is to foster user trust in autonomous decision-making and mitigate risks associated with distracted or unpredictable behaviors. Through user-centered strategies, the project seeks to inform future policies, technological development, and experience design to promote a safer, more efficient autonomous transportation ecosystem.
RESEARCH
Exploring the current state of autonomous vehicles and how pedestrians and drivers navigate shared space on college campuses
In order for us to make an opinion on the state of the future, it was important that our team had an understanding of the current state of road usage in heavily trafficked areas, such as a college campus.
Our research questions included:
When do people feel the most uncertain around autonomous vehicles?
What information do users want in the moment and what is unneccessary?
How does the environmental context change trust expectations?
To answer these questions, we conducted desk reviews on public trust and perceptions on AVs, existing policies and regulations, and human–vehicle interaction, interviews with subject matter experts and road users, and scenario observation and analysis focused on campus environments.
Key Research Insights
INSIGHT #1
Users were comfortable when AV behavior was predictable. Trust dropped sharply when vehicles paused, rerouted, or behaved unexpectedly.
Implication: Design should focus on edge moments, not just ideal flows.
INSIGHT #2
Users did not want full system logic or sensor readouts. They wanted plain-language explanations that answered “what is happening” and “why.”
Implication: Transparency must be interpretable, not exhaustive.
INSIGHT #3
Campus users expected AVs to behave cautiously and communicate clearly due to dense pedestrian presence and social norms.
Implication: Trust signals must adapt to environment, not remain static.
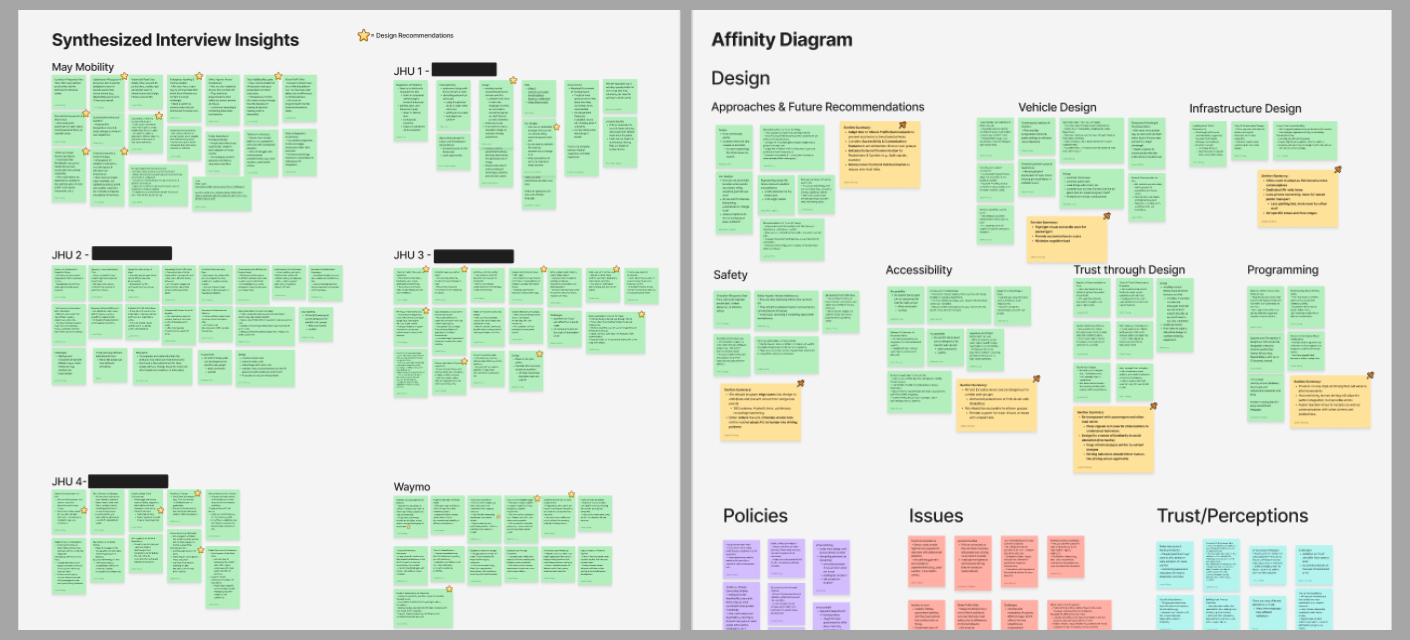
Across early milestones, our work moved from understanding system-level challenges to identifying interaction-level opportunities. Initial explorations focused on mapping stakeholders, policies, and AV ecosystems. While this provided valuable context, it became clear that these layers alone did not explain why people felt uneasy around autonomous vehicles.
As we synthesized interview data, scenarios, and literature, a consistent pattern emerged: discomfort wasn’t rooted in abstract concerns about autonomy; instead, it was triggered by specific moments of uncertainty. Pauses at crosswalks, unexpected reroutes, or slow approaches to pedestrians created tension, even when behavior was technically correct.
Concept Development & Prototyping
Showcasing the Future of AVs and their Integration into College Campuses
With a grounded understanding of both AV technology and campus behavior, we moved into future-facing design. To visualize all the environmental factors surrounding the space of AV, we developed these deliverables: policy ideation, speculative vehicle design, and storytelling.
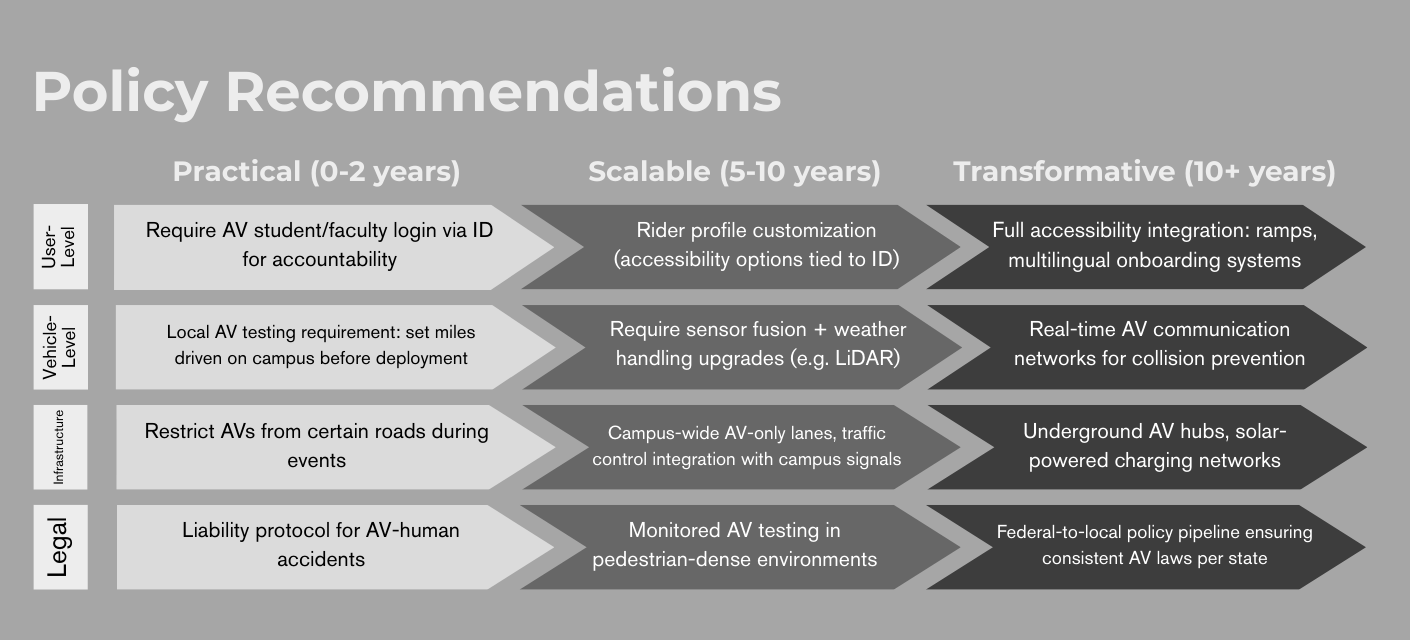
We first facilitated a policy ideation workshop to explore “what if” scenarios across pedestrian safety, VRU (vulnerable road user) protection, emergency response, large campus events, and infrastructure. We then grouped these ideas into recommendations for four stakeholder groups: vehicle manufacturers, AV service users, lawmakers, and campus transportation teams.
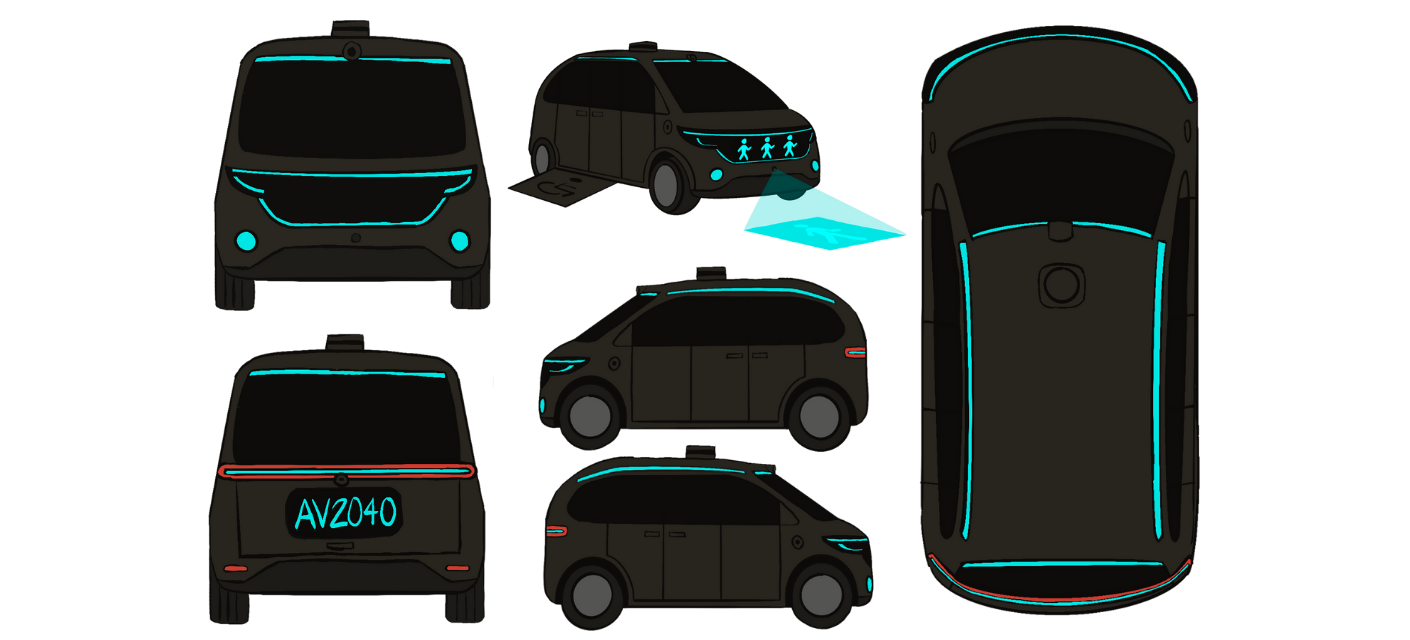
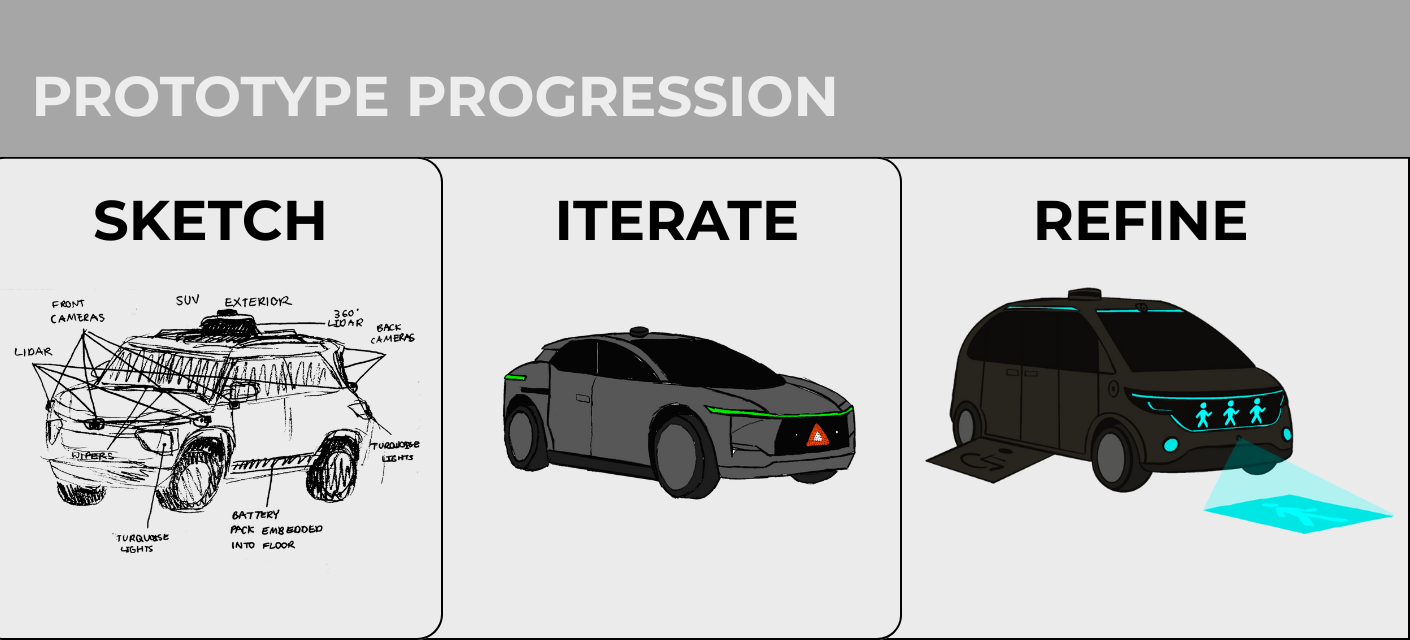
In parallel, we sketched and prototyped a future-state AV designed for a campus environment:
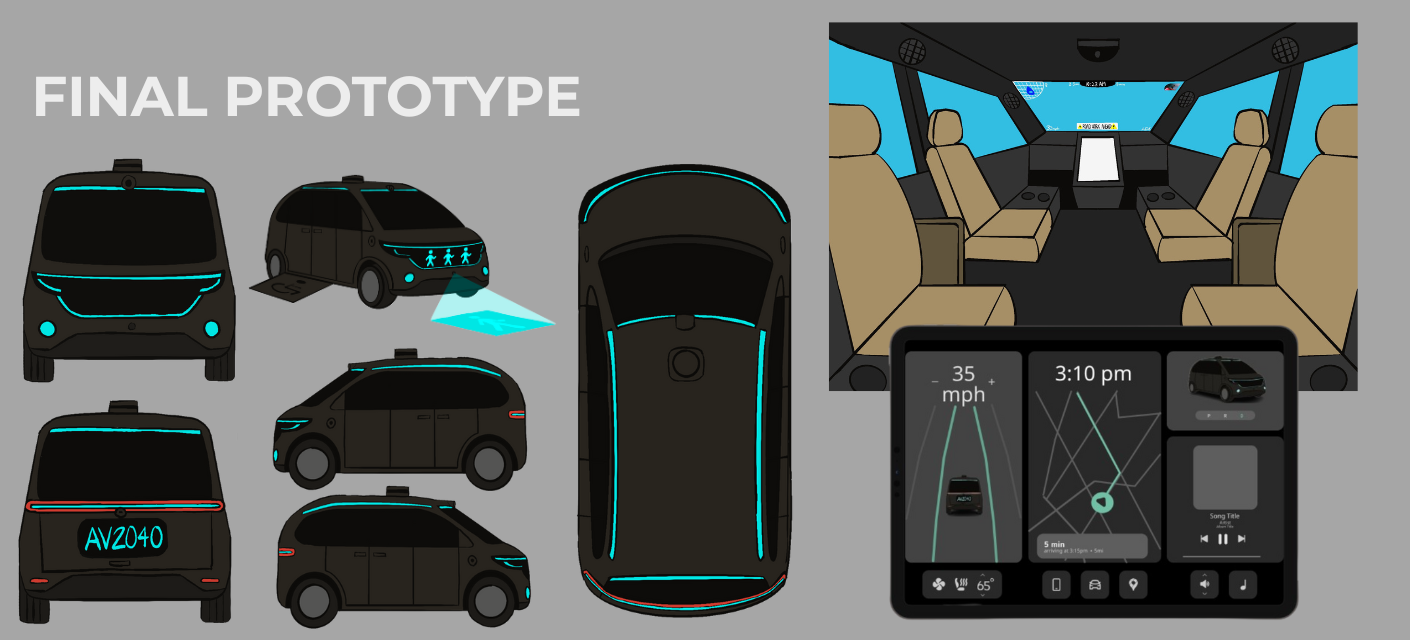
Exterior: SUV-like form factor with LiDAR + 360° cameras, turquoise lighting to distinguish AVs from traditional vehicles, and front/back displays plus projected crosswalks to clearly signal intent.
Interior: Reconfigurable seating, folding tables, wheelchair ramp access, and an interface designed for calm, limited cognitive load rather than flashy features.
Interface: Hazard pop-ups, ADAS visualization (showing how the AV “sees” the environment), concise navigation, and lightweight controls for speed, climate, and media.
To bring these ideas to life, we created a design fiction vignette framed as “A Day in the Life of an AV.” Rather than centering solely on one user persona, the vignette follows the AV as it serves multiple riders throughout a single day highlighting how design features and policies converge in everyday scenarios. Each story highlights a different aspect—like access ramps, charging hubs, or pedestrian signaling—showing how the AV system responds to real constraints and behaviors on a college campus.
OUTCOMES
🚨
Designed patterns that communicate autonomous vehicle intent during stops, reroutes, and edge cases
🤝
Reframed trust as a design problem, using plain language and real-time cues to reduce ambiguity
📍
Explored autonomous system communication in dense campus environments where social norms affect trust
FINAL PROJECT REFLECTION
Trust in autonomous vehicles is ultimately an experience design problem. Even technically correct behavior fails if users cannot understand what the system is doing in real time. This project reframes trust as a design responsibility by focusing on interpretability, real-time intent communication, and context-aware behavior, showing how interaction design can drive public acceptance in high-visibility environments like college campuses. Rather than treating transparency as a data problem, it positions it as a communication challenge, a shift that matters for any AV team building products that need to coexist with everyday users. The next phase would validate these interpretability patterns in live or simulated environments and adapt them across different contexts to support scalable, environment-specific communication.
Dive Deeper
For this project's final deliverables, our team compiled the following products.
.png)